Quite some time ago now, I wanted to make some of remote control car. And, also, eventually turn it into an autonomous sumobot or similar.
This project was done a few years ago, but I’m writing it up now.
In the interest of getting something into my hands that I can iterate on, I did it as quickly as possible.

Yes, that is a structural q-tip. The cardboard was collapsing.
This crappiness is actually a feature – because I introduced this as a workshop to a bunch of people. Mostly beginners, with minimal exposure to electronics or microcontrollers.
Operation is simple. You program it in with your WiFi credentials, then when you turn it on, it creates a webpage that is just a joystick. That controls the car. It’s surprisingly satisfying.
The repo is here. It includes materials and code.
Everything in this sort of direction in the future will be a little bit more complicated or interesting, I just wanted to break the seal.
The fun in this project is quickly and cheaply building something simple, that can be controlled easily. No part of this is too hard to understand, and therefore, improve.
So with that in mind, I ran a few workshops to get other people started.
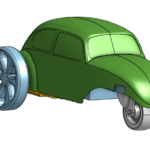
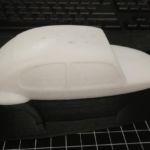
As a fun detour, I took the opportunity to play around with a vacuformer.
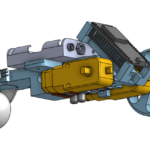
I modified a VW beetle model to remove the front fenders to better fit the single castor front wheel, then 3D printed the buck.


This is in parallel with designing an internal frame to hold all of the components together. For personal stuff, I usually use OnShape for my CAD, lately. The free version forces designs to be open source / publicly searchable, which is pretty great when banging together AliExpress modules. And also for the base VW model to modify into a tricycle.